3DRegNet: A Deep Neural Network
for 3D Point Registration
IEEE/CVF Conf. Computer Vision and Pattern Recognition (CVPR), 2020
G. Dias Pais Srikumar Ramalingam Venu Madhav Govindu Jacinto C Nascimento Rama Chellappa Pedro Miraldo
E-Mail: goncalo.pais@tecnico.ulisboa.pt
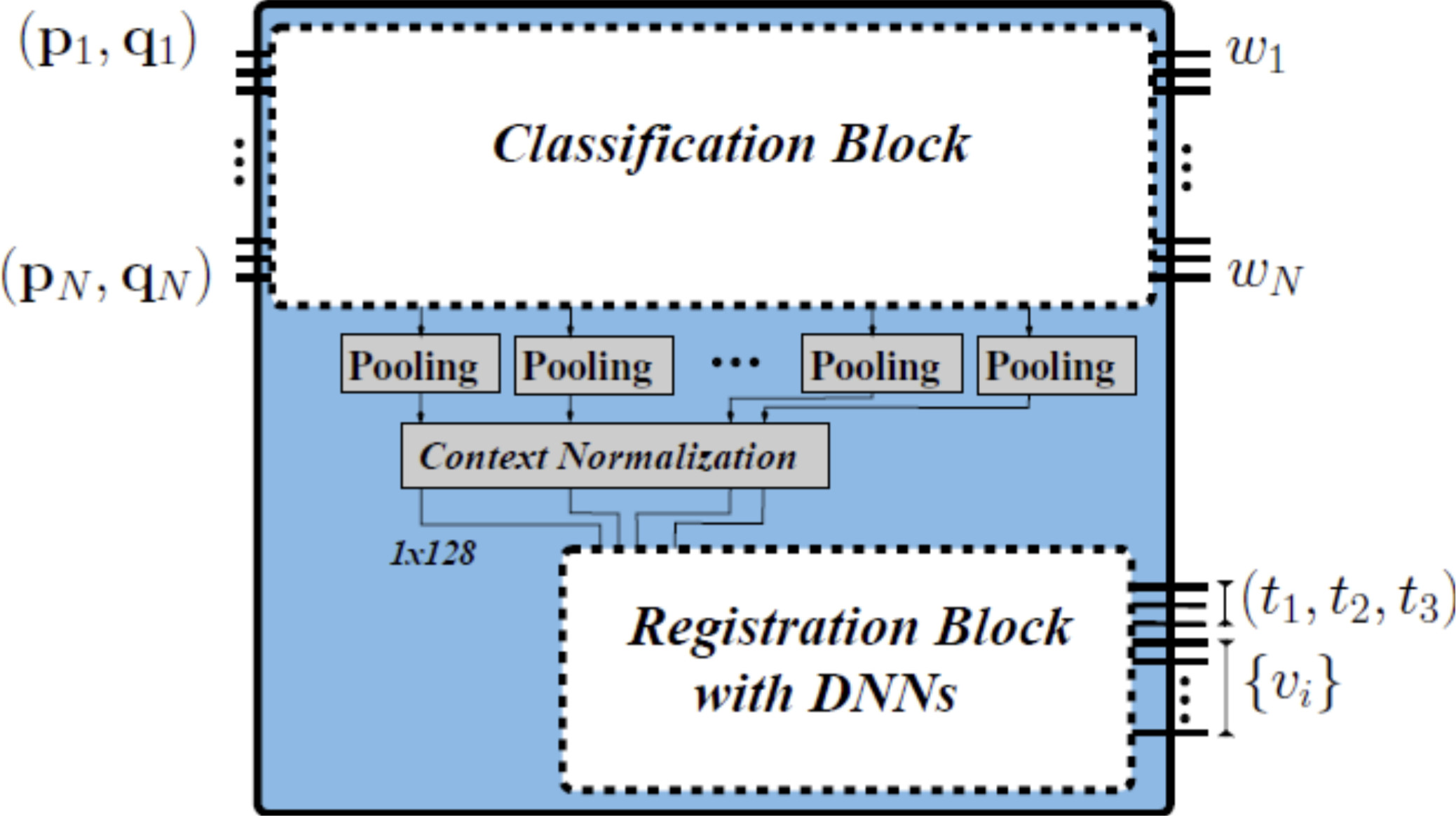
We present 3DRegNet, a novel deep learning architecture for the registration of 3D scans. Given a set of 3D point correspondences, we build a deep neural network to address the following two challenges: (i) classification of the point correspondences into inliers/outliers, and (ii) regression of the motion parameters that align the scans into a common reference frame. With regard to regression, we present two alternative approaches: (i) a Deep Neural Network (DNN) registration and (ii) a Procrustes approach using SVD to estimate the transformation. Our correspondence-based approach achieves a higher speedup compared to competing baselines.
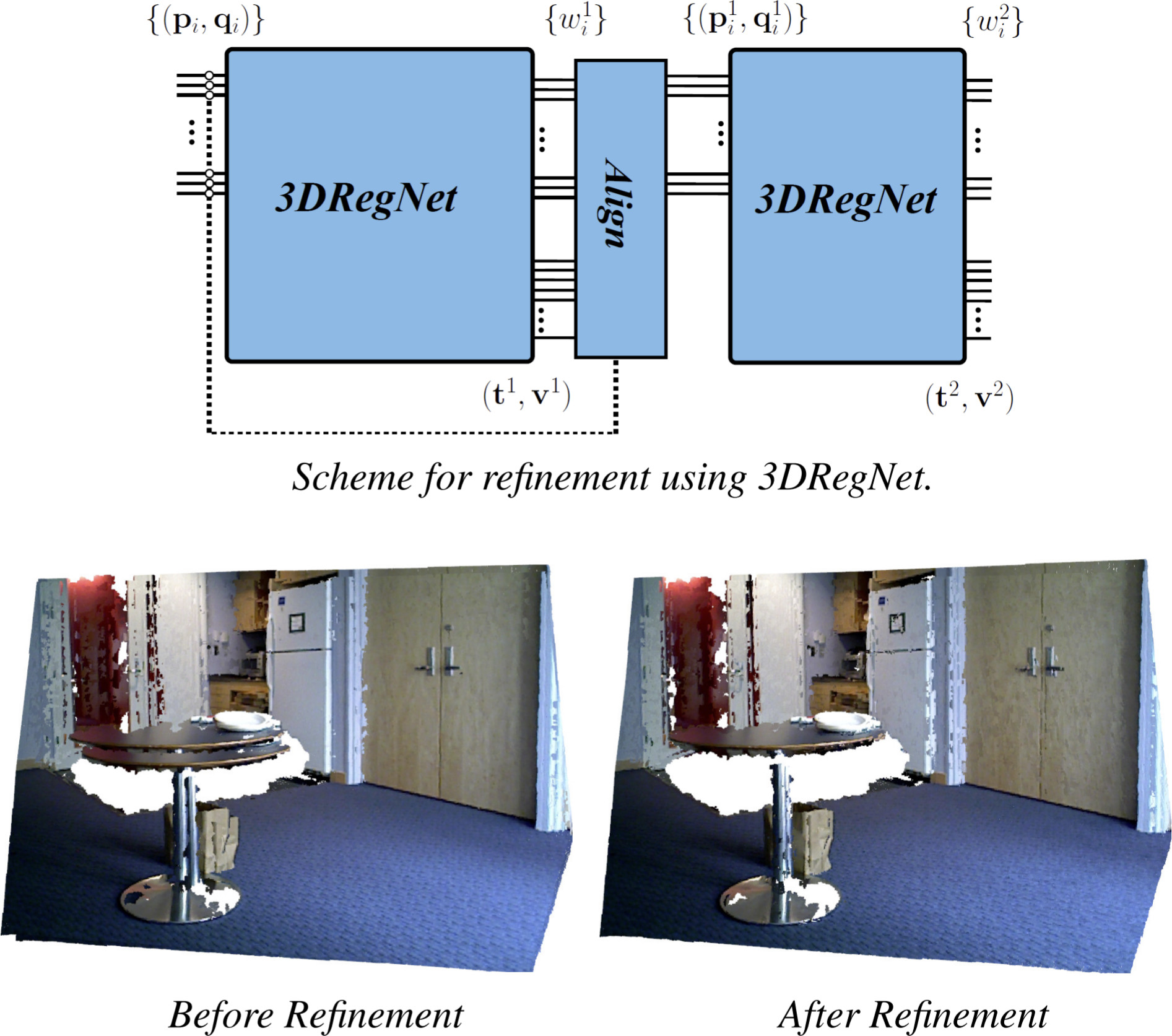
We describe our architecture consisting of two 3DRegNet where the second network provides a regression refinement. A commonly adopted approach for 3D registration is to first consider a rough estimate for the transformation followed by a refinement strategy. Following this reasoning, we consider the possibility of using an additional 3DRegNet. The first 3DRegNet provides a rough estimate trained for larger rotation and translation parameters values. Subsequently, the second smaller network is used for refinement, estimating smaller transformations. This can also be seen as deep-supervision that is shown to be useful in many applications.
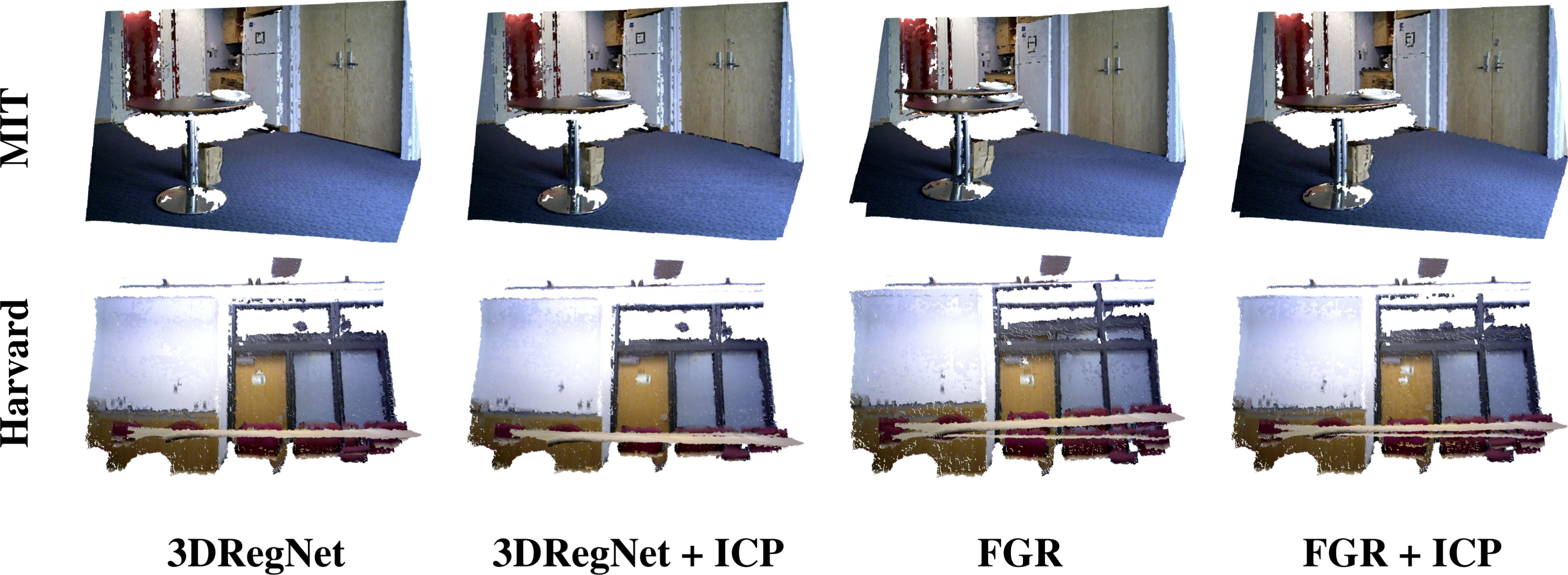
We can see that the initial estimates provided by 3DRegNet (3DRegNet + ICP) outperform those of FGR + ICP. It is particularly noteworthy that even though ICP is local, 3DRegNet + ICP converges to a better minimum than FGR + ICP. This means that a deep learning approach allows us to perform better when the pairwise correspondences are of lower quality, making the problem harder. We are at least 8x faster than FGR and 25x faster than RANSAC in computation time. All computation timings are obtained using the CPU. When considering the use of ICP and Umeyama refinement techniques, in terms of accuracy, we see that both the 3DRegNet + ICP and the 3DRegNet + U beat any other methods. With results from 3DRegNet + ICP, we conclude that the solution to the transformation provided by our network leads ICP to a lower minimum than FGR + ICP. From 3DRegNet + U, we get that our classification selects better the inliers. We can draw the same conclusions as before in terms of computation time. We show some visualization results below.

Bibtex:
@InProceedings{Pais20,
Author = {G. Dias Pais and Srikumar Ramalingam and Venu Madhav Govindu and
Jacinto C. Nascimento and Rama Chellappa and Pedro Miraldo},
Title = {3DRegNet: A Deep Neural Network for 3D Point Registration},
Year = {2020},
booktitle = {IEEE/CVF Conf. Computer Vision and Pattern Recognition (CVPR)},
pages = {7191-7201},
}